Tampilan holografik 3D definisi tinggi dapat meningkatkan keselamatan di jalan raya
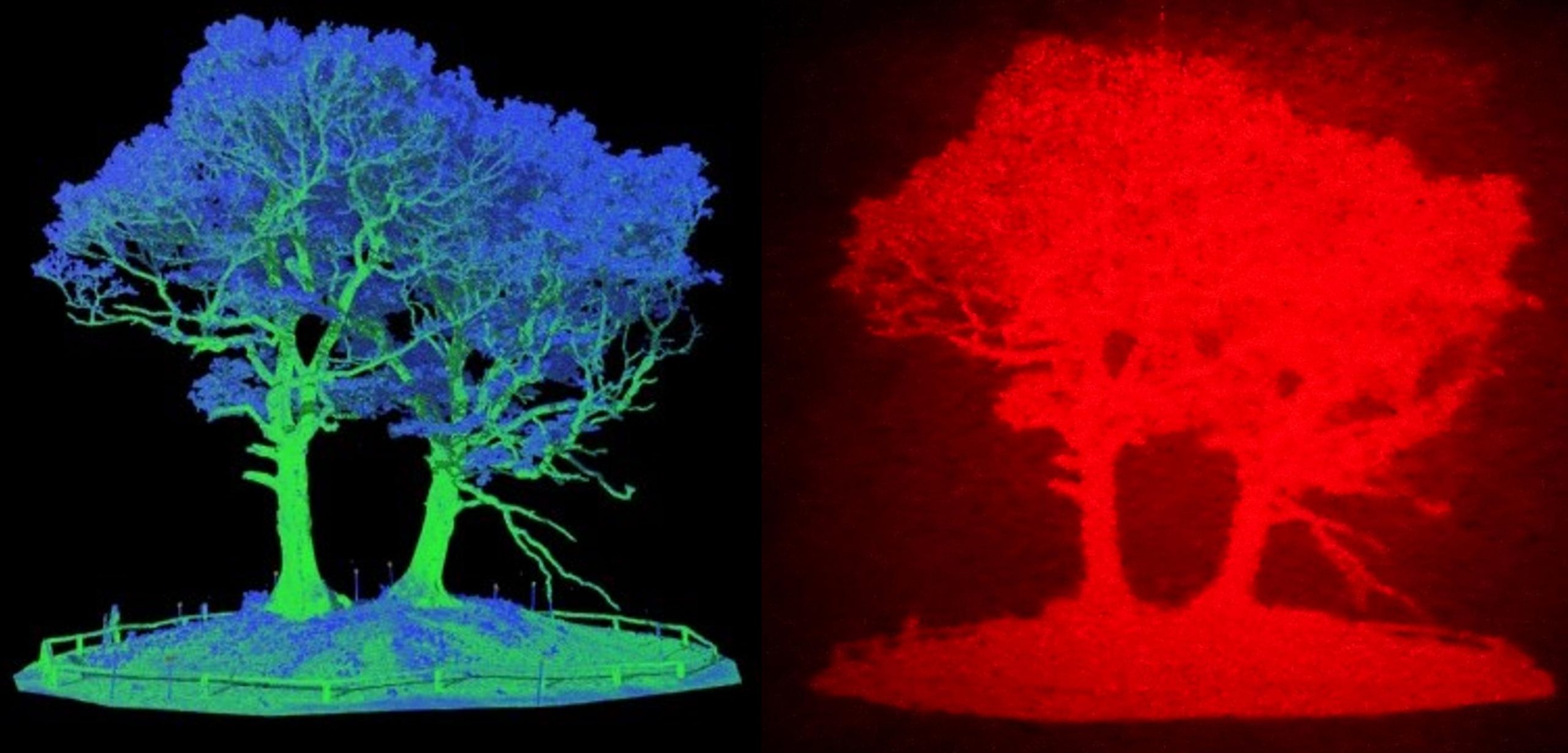
Kiri: Gambar pohon berdasarkan data LiDAR. Kanan: Gambar yang sama telah diubah menjadi gambar 3D. Kredit: Jana Skirnewskaja
Para peneliti telah mengembangkan tampilan augmented reality berbasis LiDAR pertama untuk digunakan dalam kendaraan. Pengujian pada versi awal teknologi menunjukkan bahwa teknologi ini dapat meningkatkan keselamatan jalan dengan “melihat melalui” objek untuk memperingatkan potensi bahaya tanpa mengganggu pengemudi.
Teknologi tersebut, dikembangkan oleh para peneliti dari University of Cambridge, dan Universitas Oxford, And University College London (UCL), berdasarkan LiDAR (Light and Range Detection), dan menggunakan data LiDAR untuk membuat representasi 3D resolusi tinggi dari objek jalan yang disiarkan langsung ke mata pengemudi, bukan proyeksi kaca depan dua dimensi digunakan di sebagian besar layar.
Meskipun teknologinya belum diuji di kendaraan, pengujian awal, berdasarkan data yang dikumpulkan dari jalan yang sibuk di pusat kota London, menunjukkan bahwa hologram muncul di bidang pandang pengemudi sesuai dengan lokasi fisiknya, menciptakan augmented reality. Ini mungkin sangat berguna ketika hal-hal seperti rambu jalan disembunyikan oleh pohon atau truk besar, misalnya, memungkinkan pengemudi untuk “melihat” rintangan yang terlihat. Hasilnya dilaporkan di jurnal Optex Express.
Penulis utama Jana Skirnewskaja, Ph.D., mengatakan: “Layar di atas kepala terintegrasi ke dalam kendaraan yang terhubung, dan biasanya menampilkan informasi seperti kecepatan atau tingkat bahan bakar langsung ke kaca depan di depan pengemudi, yang harus memperhatikan pandangannya ke jalan. Calon dari Departemen Teknik di Cambridge. “Namun, kami ingin melangkah lebih jauh dengan merepresentasikan objek nyata dalam bentuk proyeksi panorama 3D.”
Skirnewskaja dan rekan-rekannya mendasarkan sistem mereka pada LiDAR, metode penginderaan jauh yang bekerja dengan mengirimkan pulsa laser untuk mengukur jarak antara pemindai dan objek. LiDAR biasanya digunakan di bidang pertanian, arkeologi, dan geografi, tetapi juga dicoba di kendaraan otonom untuk mendeteksi rintangan.
Dengan menggunakan LiDAR, para peneliti mensurvei Malet Street, jalan yang sibuk di kampus UCL di pusat kota London. Penulis bersama Phil Wilkes, seorang ahli geografi yang biasanya menggunakan LiDAR untuk mensurvei hutan tropis, memindai seluruh jalan dengan teknik yang disebut pemindaian tanah dengan laser. Jutaan pulsa dikirim dari berbagai lokasi di sepanjang Jalan Mallet. Data LiDAR kemudian digabungkan dengan data point cloud, dan model 3D dibangun.
“Dengan cara itu, kita dapat mengumpulkan pindaian bersama, dan membangun keseluruhan pemandangan, tidak hanya memungut pepohonan tetapi juga mobil, truk, orang, rambu, dan segala sesuatu yang mungkin Anda lihat di jalan biasa di kota,” kata Wilkes. “Meskipun data yang diambil berasal dari platform tetap, itu serupa dengan sensor yang akan ada pada kendaraan otonom atau semi-otonom generasi berikutnya.”
Saat model 3D Malet St selesai, para peneliti kemudian mengubah berbagai objek di jalan menjadi proyeksi 3D. Data LiDAR berupa point cloud diolah dengan algoritma separasi untuk mengidentifikasi dan mengekstrak objek target. Algoritma lain digunakan untuk mengubah organisme target menjadi pola difraksi yang dihasilkan komputer. Titik data ini telah diterapkan dalam pengaturan optik untuk melihat objek 3D 3D di bidang pandang pengemudi.
Pengaturan optik mampu menampilkan banyak lapisan hologram dengan bantuan algoritme tingkat lanjut. Proyeksi holografik dapat muncul dalam berbagai ukuran dan sesuai dengan posisi benda nyata yang direpresentasikan di jalan. Misalnya, rambu jalan tersembunyi mungkin muncul sebagai proyeksi 3D relatif terhadap lokasi fisiknya di belakang rintangan, dan bertindak sebagai mekanisme peringatan.
Di masa mendatang, para peneliti berharap dapat meningkatkan sistem mereka dengan menyesuaikan tata letak tampilan di atas kepala dan membuat algoritme yang mampu menampilkan banyak lapisan objek yang berbeda. Hologram berlapis ini dapat diatur secara bebas di ruang penglihatan pengemudi. Misalnya pada lapisan pertama, lampu lalu lintas dapat ditampilkan pada jarak lain dengan ukuran yang lebih kecil. Pada lapisan kedua, tanda peringatan dapat ditampilkan pada jarak yang lebih dekat dengan ukuran yang lebih besar.
“Teknologi berlapis ini memberikan pengalaman augmented reality dan memberi tahu pengemudi secara alami,” kata Skirnewskaja. “Setiap orang mungkin memiliki preferensi yang berbeda untuk pilihan tampilan mereka sendiri. Misalnya, tanda kesehatan vital pengemudi dapat ditampilkan di lokasi yang diinginkan pada tampilan head-up.
Proyeksi panorama 3D dapat menjadi tambahan berharga untuk tindakan keamanan yang ada dengan menampilkan objek jalan secara real time. Hologram memberi tahu pengemudi tetapi tidak mengganggu dia. “
Peneliti sekarang sedang bekerja untuk mengurangi komponen optik yang digunakan dalam struktur holografik agar dapat ditempatkan di dalam mobil. Setelah persiapan selesai, uji kendaraan akan dilakukan di jalan umum Cambridge.
Referensi: “Hologram Digital Turunan LiDAR untuk Tampilan Kendaraan” Diposting oleh Jana Skernewskaaga, Yunwin Montelongo, Phil Wilkes dan Timothy de Wilkinson, 21 April 2021; Optex Express.
DOI: 10.1364 / OE.420740
Skirnewskaja adalah kandidat PhD di EPSRC Centre for Doctoral Training (CDT) di Connected Electronic and Photonic Systems, sebuah pusat gabungan dengan Universitas Cambridge dan UCLA. Dia juga merupakan rekan dari German Business Foundation (SDW).
About The Author

“Penggemar musik yang ramah hipster. Analis. Praktisi bir. Perintis twitter yang sangat menawan. Communicator.”