Kit mix-and-match dapat memungkinkan astronot membuat robot untuk eksplorasi bulan

Di tahun-tahun mendatang, NASA bertujuan mengirim orang ke Bulan untuk mulai membangun pangkalan permanen. Badan Penerbangan dan Antariksa Nasional (NASA) berencana untuk kembali ke bulan dengan program Artemis pada paruh kedua dekade ini.
Robot dapat melakukan tugas padat karya seperti membangun kabel, memasang panel surya, mendirikan menara komunikasi, dan membangun rumah. Namun, setiap robot dirancang untuk melakukan fungsi atau tugas tertentu. Dalam hal ini, koloni bulan mungkin diserang oleh sekumpulan robot, masing-masing dengan komponen dan mode operasi yang unik.
Sebuah tim insinyur MIT sedang merancang satu set bagian robot universal yang dapat dengan mudah dipadupadankan oleh seorang astronot untuk membuat “jenis” robot yang berbeda untuk berbagai misi di bulan.
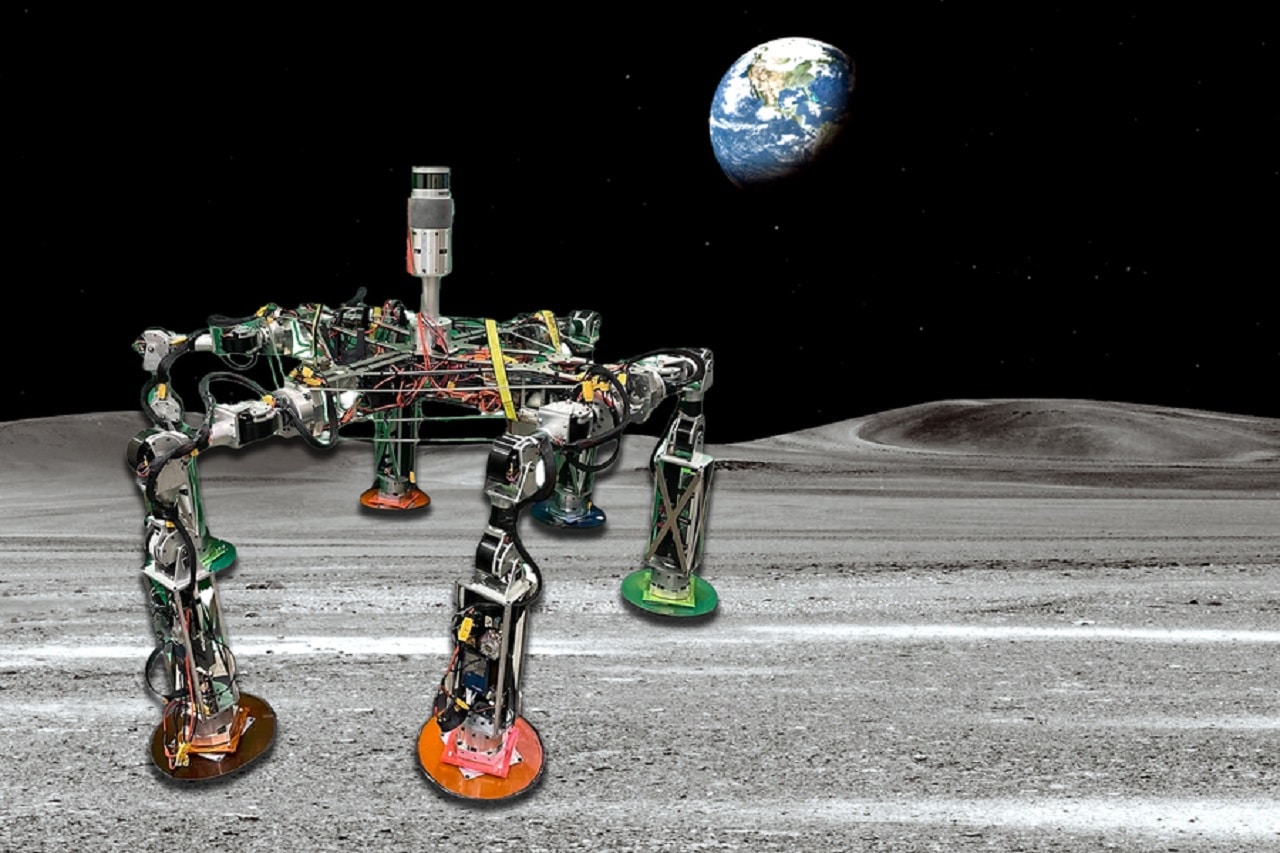
Sistem ini disebut WORMS, untuk sistem mobilitas robot oligomer berjalan. Ini termasuk anggota tubuh robot yang diilhami cacing yang dapat dengan mudah dipasang oleh astronot ke pangkalan. Bagian dapat dikonfigurasi untuk membangun bot “paket” besar yang mampu membawa panel surya berat ke atas bukit atau bot laba-laba dengan enam kaki yang dapat diturunkan menjadi tabung lava untuk menggali air dingin.
Desainnya fleksibel, berkelanjutan, dan hemat biaya. Tim membangun dan mendemonstrasikan robot cacing berkaki enam. Pekan lalu, tim Lordos mempresentasikan temuan mereka di IEEE Space Conference dan dianugerahi makalah terbaik di konferensi tersebut.
Bagian utama dari sistem termasuk aksesori, atau worm, yang dapat dilampirkan ke objek atau struktur melalui “blok antarmuka universal” yang mengunci dua bagian bersama-sama melalui mekanisme twist-and-lock. Bagian-bagiannya dapat dipisahkan dengan alat kecil yang melepaskan sekrup pegas blok.
Pada generasi pertama, setiap pelengkap memiliki panjang sekitar 1 meter dan berat sekitar 20 pon. Dalam gravitasi bulan, setiap anggota tubuh memiliki berat sekitar 3 pon. Tim telah merencanakan spesifikasi untuk generasi yang lebih besar dengan attachment yang sedikit lebih panjang dan lebih berat, yang dapat digabungkan untuk membuat robot “paket” yang mampu mengangkut muatan berat.

Pemimpin tim George Lordos, Ph.D. Calon Lulusan dan Instruktur di Departemen Aeronautika dan Astronautika (AeroAstro) MIT, Dia berkataDan “Anda dapat membayangkan gudang di bulan dengan rak-rak cacing” tentang robot otonom artikulasi yang membawa motor, sensor, komputer, dan baterai. Para astronot dapat masuk ke gudang dan memilih cacing yang mereka butuhkan, bersama dengan sepatu, tubuh, sensor, dan peralatan yang sesuai, dan mereka dapat menyatukan semuanya, lalu membongkarnya untuk membuat yang baru. Desainnya fleksibel, berkelanjutan, dan hemat biaya.”
Worms dikandung pada tahun 2022 sebagai jawaban atas Tantangan Ide Inovatif dan Inovatif (BIG) NASA, sebuah kompetisi tahunan bagi mahasiswa untuk merancang, mengembangkan, dan mendemonstrasikan ide yang mengubah permainan.
Tim tersebut bertujuan merancang robot bulan untuk menavigasi medan keras kutub selatan bulan, yang ditandai dengan debu tebal dan halus, lereng berbatu yang curam, dan tabung lava yang dalam.
Ambil inspirasi dari binatang seperti laba-laba, gajah, dan kambing. Mereka menyadari bahwa salah satu hewan paling sederhana, cacing, melakukan gerakan yang mirip dengan lengan.
Lordus, keturunan Yunani, membantu membuat cacing dan memilih huruf “O” untuk singkatan dari “oligomer”, yang dalam bahasa Yunani berarti “beberapa bagian”.
Brooke Bench, seorang mahasiswa sarjana di AeroAstro, berkata, “Ide kami adalah, dengan hanya beberapa bagian yang disatukan dengan cara yang berbeda, Anda dapat mencampur dan mencocokkan dan memiliki semua robot yang berbeda ini.”
Wakil presiden tim AeroAstro dan mahasiswa pascasarjana Michael Brown berkata, “Saat kami memikirkan tentang inspirasi hewan ini, kami menyadari bahwa salah satu hewan paling sederhana, cacing, melakukan gerakan yang mirip dengan lengan, atau kaki, atau tulang belakang, atau ekor. Lalu bola lampu padam: Kami bisa bangun semua robot yang terinspirasi hewan ini dengan pelengkap seperti cacing.” .
Jacob Rodriguez, seorang mahasiswa sarjana di AeroAstro, mengatakan: “Di iterasi mendatang, kami berharap dapat menambahkan lebih banyak sensor dan alat tambahan, seperti tuas, sensor keseimbangan, dan auger.”
Kevin Kempton, seorang insinyur di NASA Langley Research Center yang menjabat sebagai juri untuk Tantangan Ide Besar 2022, mengatakan: “Ada banyak istilah yang menggambarkan sistem yang efektif untuk eksplorasi ruang angkasa masa depan: modular, dapat dikonfigurasi ulang, dapat disesuaikan, fleksibel, inklusif, dll. Cacing konsep MIT mencakup semua kualitas ini dan banyak lagi.”
Konsep MIT WORMS adalah sistem modular, dapat dikonfigurasi ulang, dapat disesuaikan, fleksibel, inklusif untuk eksplorasi ruang angkasa di masa depan. Tim mengembangkan perangkat lunak yang dapat dirancang untuk mengoordinasikan banyak ekstensi. Sebagai pembuktian konsep, tim membuat robot berkaki enam seukuran stroller.
Hasilnya menunjukkan bahwa worm adalah arsitektur modular yang tahan lama, mudah dirawat, berbiaya rendah, dapat diskalakan, serbaguna, fleksibel, tahan masa depan, untuk perakitan cepat robot segala medan dan tugas berat.
Referensi jurnal:
- George Lordos, Michael J. Brown, dkk. Cacing: Bot yang tangguh di lapangan untuk medan bulan yang ekstrem. Konferensi Luar Angkasa IEEE.
About The Author

“Penggemar musik yang ramah hipster. Analis. Praktisi bir. Perintis twitter yang sangat menawan. Communicator.”